In this experiment we extract the edges of the images using Canny algorithm. For each extracted point we compute its corresponding support region based on the scale where the feature was detected. With all the edge pixels contained in this area we compute the histogram corresponding to that particular point. The approach used is taken from [1], with a log-polar grid of five ringsf and twelve sectors. The histogram-desciptor is a n x 60 matrix, where n is the number of edge points contained in the support region. The match process is performed using [2].
Edges with extrema points and descriptor example
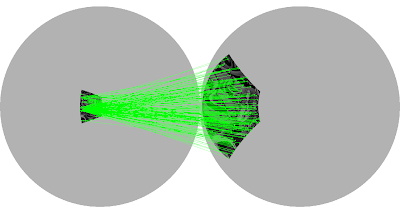
Matching Results

We observe that some points have several matches which is not correct. This is possible caused by either the similarity matrix required by [2] or by the descriptor.
In the next experiment we change the descriptor. In this case the descriptor is only the 1x60 histogram counting the number of edge pixels in each cell. The results are similar to the previous case. We need to explore more the distance between the histograms we are using.
[1] G. Mori, S. Belongie, and J. Malik. "Shape Contexts Enable Efficient Retrieval of Similar Shapes".CVPR 2001
[2] Ofir Pele and Michael Werman. "The Quadratic-Chi Histogram Distance Family". ECCV 2010.